Regular banen i WRO 2014 Regular
for alderskategorien Senior High School
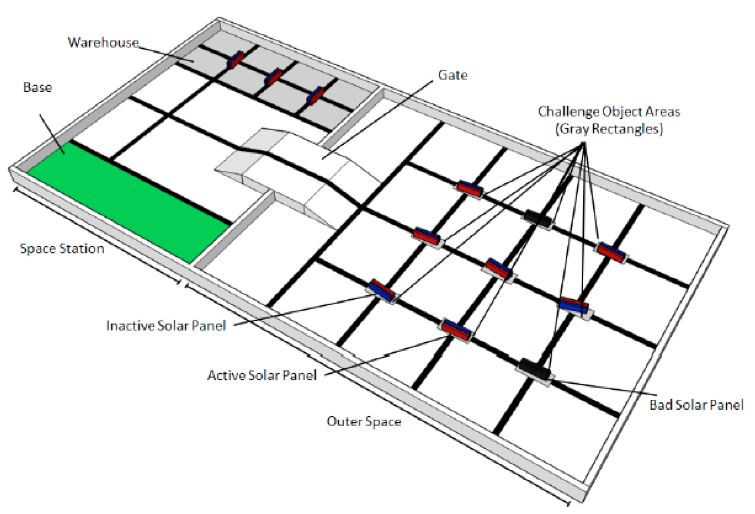
har overskriften Space Station. En robot skal starte i det grřnne felt og skal via rampen ud i rummet og checke,
rette og udskifte solceller. Defekte solceller erstattes med nye fra 'Warehouse'.
Pĺ videoen Space Station Challenge forklares, hvilke opgaver robotten skal udfřre pĺ banen.
Samtidig giver videoen et par ideer til
hvordan opgaverne kan lřses:
Her er en liste med inspiration til at bygge og programmere en robot, som kan fĺ point pĺ ĺrets bane:
Lasse Deleuran har eksperimenteret med en NXT baseret robot med en drejemekanisme,
som kan dreje de deaktive solceller pĺ plads, sĺ de bliver aktive. Samtidig sřrger drejemekanismen for,
at lyssensoren, som benyttes til at fřlge stregerne, drejes ud til siden ved passage hen over en solcelle.
Videoen WRO 2014 Regular: Turning all deactivated solar panels viser
en křrsel. Pĺ siden med videoen er der henvisninger til en byggevejledning samt mulighed for at hente
det NXT-G program, som styrer robotten rundt pĺ banen. Desvćrre er drejemekanismen ikke sćrlig robust.
Der gĺr tit kludder i drejeriet.
Pĺ kurset Embedded Systems - Embodied Agents
forsřgte fire grupper af datalogi- og ingeniřrstuderende at give forslag til lřsning af opgaverne pĺ banen. To af grupperne
nĺede at fĺ temmelig mange point pĺ banen, som det kan ses af de to videoer:
Final run med en robot bygget og programmeret af
Dan Sřndergaard og Torben Muldvang Andersen. Robotten er ganske vist langsom,
men den klarer bĺde at aktivere solceller og at udskifte defekte celler.
Pĺ videoen Demonstration of the Light Sensor Toggling Component
ses, hvordan den tredie motor benyttes til at lřfte de to lyssensorer op og ned,
sĺ der hele tiden er en lyssensor, som kan bruges til at fřlge stregerne. Flere videoer og detaljer kan ses pĺ
projekt blog'en under Project Sessions.
Embedded Systems 2014 WRO Turning 9 inactive solar
ses en noget hurtigere robot, som klarer at aktivere alle 9 solceller. Robotten er lavet af Jakob Bjerre Jakobsen,
Henrik Knakkegaard og Jesper Madsen. Ulempen ved deres robot er, at det krćver ret stabile og kontrollerede
lysforhold, fordi de lyssensorer som bruges til at fřlge stregerne sidder sĺ hřjt oppe, at de ikke střder pĺ solcellerne.
Det betyder, at lyssensorernes aflćsning pĺvirkes meget af vekslende lysforhold.
Fćlles for de fire gruppers erfaringer med banen er, at det er endog meget svćrt,
at fĺ solcellerne til at blive i den lille grĺ rektangel, nĺr de har vćret berřrt af robotten. Samtidig er det en
udfordring at lave en gribe, skubbe eller lřfte mekanisme med blot en motor.
Da mange af de lande som deltager i WRO allerede har afholdt deres nationale finaler,
findes der en rćkke videoer pĺ You Tube, som viser bĺde korrekte og hurtige křrsler pĺ ĺrets bane. Her er et udpluk:
Gruppen xanthi2010 har lavet
WRO 2014 High School Space station, som ser ud til at lřse alle opgaver pĺ omkring 2 minuter. Bemćrk farvesensorens placering
lige ovenover solcellerne og ikke pĺ siden. Mĺske en ide.
Dreje og gribe mekanismerne ser ud til at blive drevet af blot en motor. Fantastisk.
En gruppe fra Taiwan har lavet
WRO 2014 TAIWAN:140 (3BLACK+3TURN) GET 1BLACK+3TURN, som ogsĺ ser ud til at fĺ mange point.
Her er det en lřfte/sćnke mekanisme som manipulere solcellerne. Samtidig drejer denne robot ret prćcist pĺ stedet
bl.a. pĺ grund af den store hjulafstand.
En gruppe fra Meksiko viser i WRO 2014 preparatoria
eksperimenter med en mekanisme som ligner den Lasse Deleuran har eksperimenteret med. Robotten er dog noget langsom.