Sidst opdateret 1.8.15.
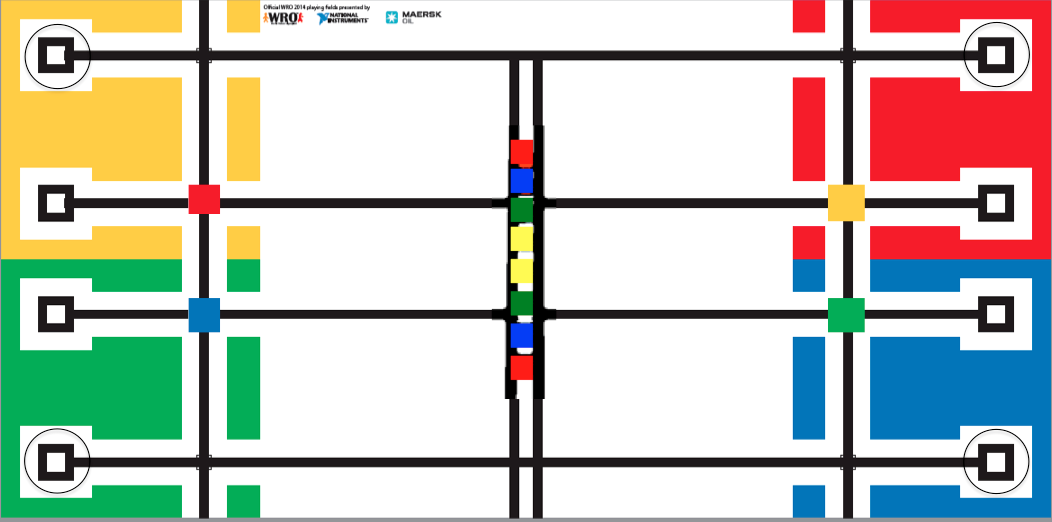
Registrering af placerings- og anbringelsesstederVed starten af en křrsel med WRO Starter Bot 2015 stilles robotten, sĺ den kan křrer henover de 8 farvede felter midt pĺ banen imellem de to sorte streger. Pĺ den mĺde kan robotten registrere de aktuelle farver af de farvede felter og dermed kan programmet, som styrer robotten, vćlge rute, nĺr de farvede kuber skal hentes og bringes til deres rette plads. Křrslen henover felterne ses pĺ videoen:
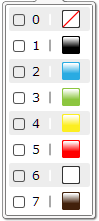
Programmet, som styrer robotten pĺ videoen, bruger den midterste farvesensor til at fřlge ydersiden af kanten af den sorte streg til venstre for robotten i křrselsretningen. Det betyder, at farvesensoren til hřjre bevćges henover de 8 farvede felter og farvesensoren kan derfor bruges til at registrere de aktuelle farver af de 8 felter. De aktuelle farver pĺ de 8 felter kan programmet dernćst bruge til at vćlge en rute, sĺ de farvede kuber bliver hentet og anbragt de steder pĺ banen, som er angivet af de aktuelle 8 farver. De forskellige muligheder for brug af farvesensoren er beskrevet i EV3 hjćlp > Generelt > Brug af sensorer > Farve, se eventuelt introduktion til farvesensor. For at kunne registrere farverne af de 8 felter skal farvesensoren bruges i tilstand Farve: I tilstand Farve registrerer farvesensoren farven, som et tal med fřlgende betydning: Pĺ videoen ser de 8 felter midt pĺ banen sĺdan her ud: Det betyder, at farvesensoren registrerer fřlgende vćrdier, nĺr robotten, som pĺ videoen křrer henover de 8 farvede felter:
Prřv at křre programmet. Prřv ogsĺ at bytte rundt pĺ de farvede felter.For at kunne vise de aktuelle farvevćrdier pĺ skćrmen er programmet nřdt til at huske vćrdierne efterhĺnden som robotten křrer henover felterne. Farvevćrdierne huskes i sĺkaldte variable (EV3 hjćlp > Programmeringsblokke > Data-blokke > Variabel): Programmet DisplayVar.ev3p ser sĺdan her ud: Programmet bestĺr af 6 blokke:
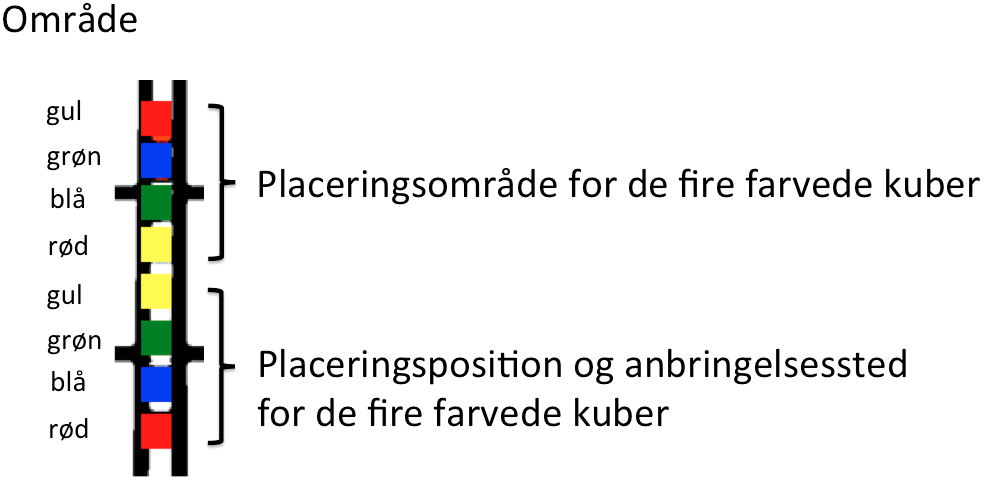
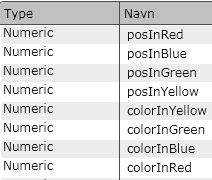
Betydningen af de 8 variable i forhold til de farvede felter er:
Situation A og B er forklaret i regler ved den danske finale. Med de 8 felter som pĺ videoen bliver vćrdierne af de 8 variable altsĺ:
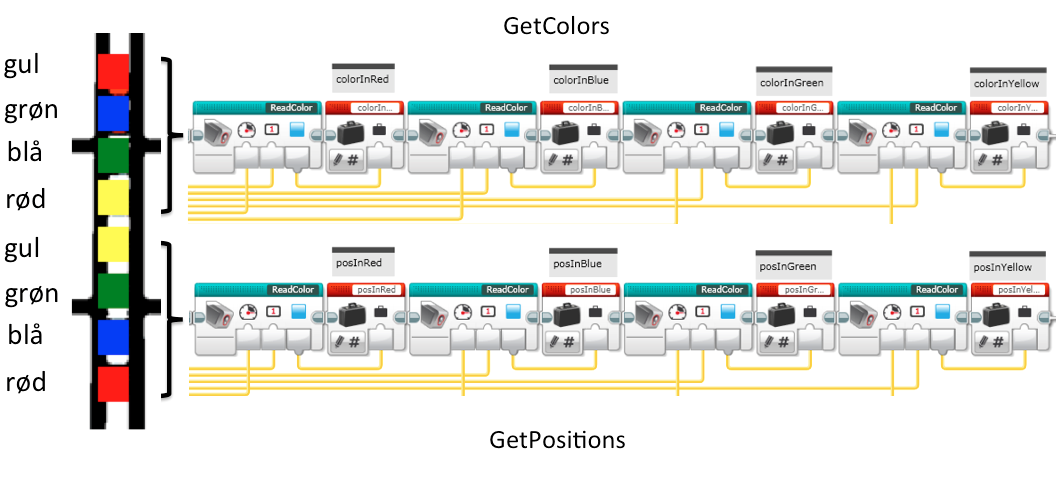
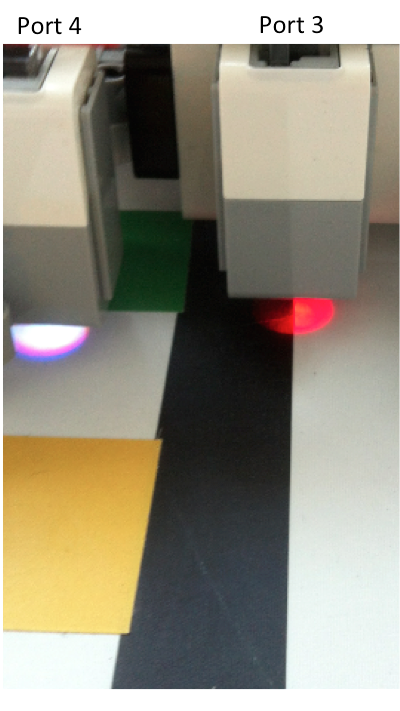
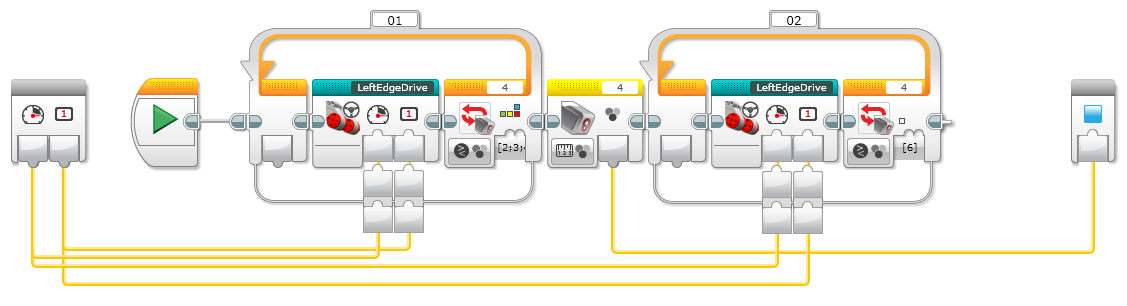
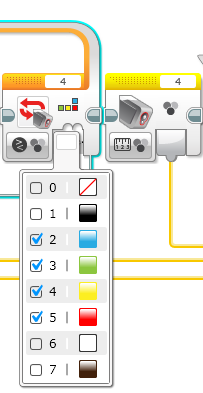
Svarende til fřlgende placerings- og anbringelsessteder: GetPositions og GetColorsGetPositions, fĺr robotten til at křre henover de 4 fřrste felter, registrerer de 4 farvevćrdier og huske dem i 4 forskellige variable. GetColor klarer de 4 nćste felter pĺ tilsvarende vis. Den eneste forskel pĺ indholdet af de to blokke er navnene pĺ de variable, som de registrerede farver gemmes i. Dette kan ses her, hvor indholdet af de to blokke er vist ud for de farvede felter som registreres:De to input parametre bĺde til GetPositions og GetColors, minPower og P, gives videre som input til de 4 ReadColor blokke: ReadColorDe to farvesensorer pĺ henholdsvis port 3 og 4 bruges i blokken ReadColor til dels at fřlge kanten af den sorte streg til venstre i křrselsretningen, dels at registrere de farvede felters aktuelle farver:Ĺbnes ReadColor, f.eks. i en ny fane ved at dobbeltklikke pĺ ReadColor, ser den sĺdan her ud: I blokken er der to sĺkaldte lřkker ( EV3 hjćlp > Programmeringsblokke > Flow-blokke > Lřkker): Den fřrste lřkke, 01, udfřrer blokken LeftEdgeDrive, som fĺr robotten til at fřlge kanten af den sorte linie, indtil farvesensoren pĺ port 4 registrerer en af farverne rřd, blĺ, grřn eller gul. Nĺr en af de fire farver registreres fortsćttes med den nćste program blok efter lřkken, altsĺ farvesensor-blokken imellem de to lřkker ( EV3 hjćlp > Programmeringsblokke > Sensorblokke > Farve): Da farvesensoren pĺ port 4 benyttes i tilstanden Farve, vil den vćrdi, som farvesensor-blokken registrerer altsĺ vćre et af tallene, der fik lřkken til at stoppe dvs 2, 3, 4 eller 5: Den anden lřkke, 02, udfřrer ligeledes blokken LeftEdgeDrive, men nu indtil farvesensoren pĺ port 4 registrerer farven hvid. Nĺr hvid registreres fortsćttes med den nćste program blok efter lřkken, altsĺ blokken efter ReadColor. Det betyder, at ReadColor bringer robotten langs stregen til farvesensoren pĺ port 4 er over hvid. Nĺr sĺ nćste ReadColor udfřres, f.eks. som i GetPositions, er robotten altsĺ klar til at registrere farven pĺ det nćste farvede felt. De to input parametre til ReadColors, minPower og P, gives videre som input til de to LeftEdgeDrive blokke; output, color, er den registrerede farve fra farvesensor-blokken: |