ToBlue - WRO Starter Bot kører til blåt Recycling Container Area
ToBlue, en brugerdefinet programmeringsblok, får robotten til at køre ud fra StartArea og
bruge de sorte streger til at
nå frem til en position lige ud for det blå Container Area, som det ses på videoen:
I videoen styres
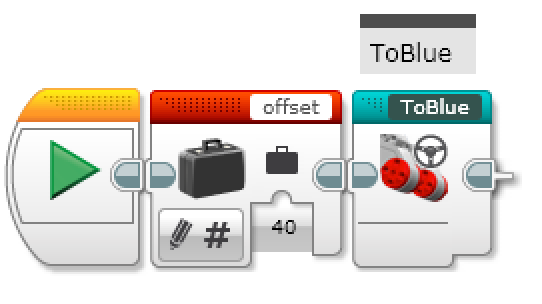
WRO Starter Bot 2016 af et program som ser sådan her ud:
Programmet består af 2 blokke:
Den første blok er en variabel-blok, som sætter en variabel kaldet offset til 40 (se eventuelt
EV3 hjælp > Programmeringsblokke > Data-blokke > Variabel). Værdien af offset skal være den lysværdi
farvesensoren på port 3 registrerer over kanten af en af de sorte streger på banen, se
Følg kanten af en sort streg.
Den næste blok, kaldet ToBlue, får robotten til at køre ud fra StartArea og bruge de sorte streger til at
nå frem til en position lige ud for det blå Container Area.
De 4 første blokke, MoveCm, GoToLine,
og SpinDegree
får robotten til at køre ud til den sorte streg og dreje 90 grader til venstre,
så robotten er klar til at følge stregen:
De næste 2 blokke, DriveEdgeSec og DriveEdgeTo,
får robotten til at køre langs kanten af den sorte streg,
så robotten standser ud for stregen ind til det blå område:
De 2 sidste blokke, MoveCm
og SpinDegree,
får robotten til at køre 10 cm frem og dreje 90 grader til højre,
så robotten er klar til at følge stregen til det blå område: