![]()
Sidst opdateret 21.8.18.
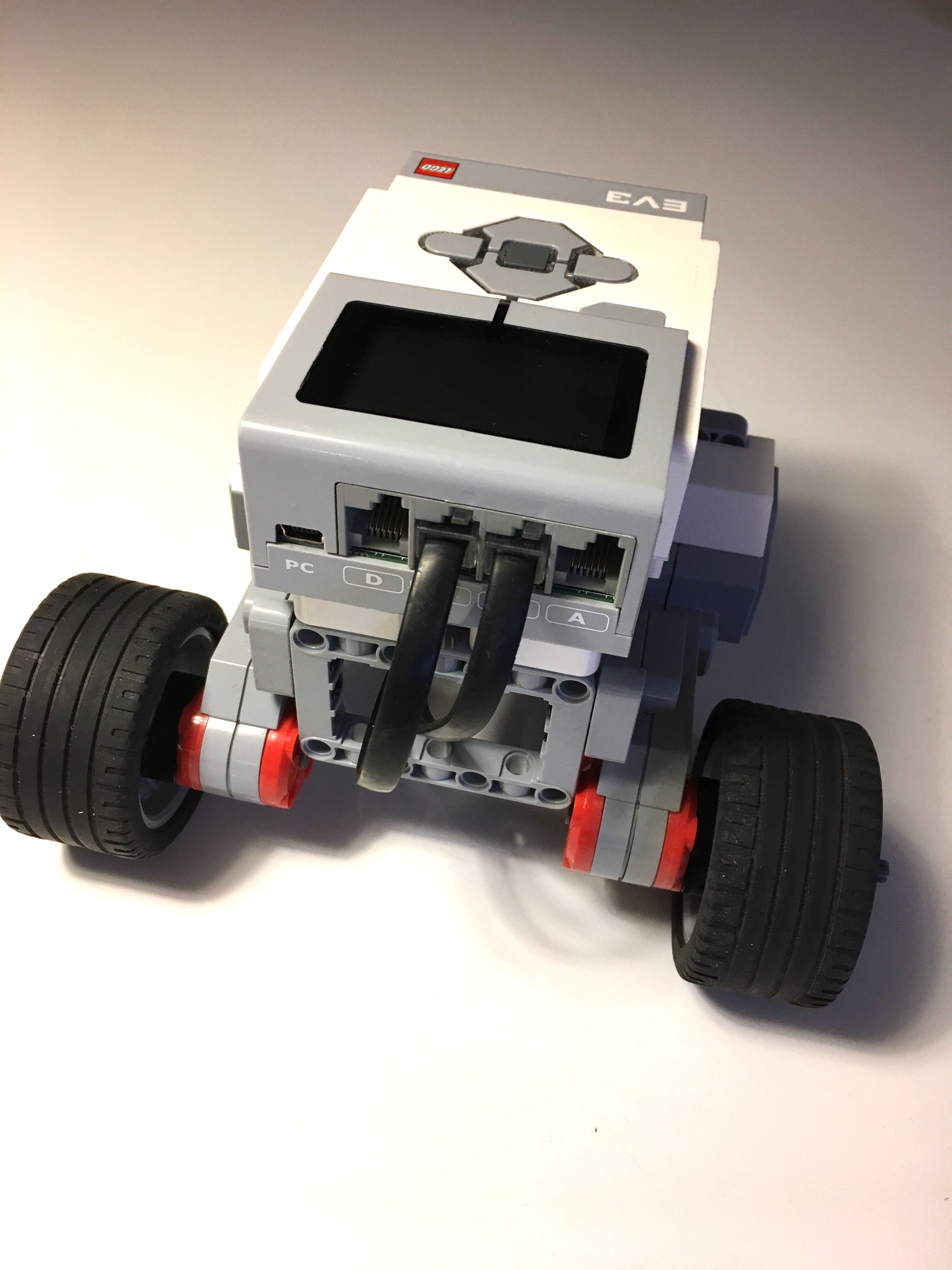
Bygning af basisrobotBasisrobotten ser sĺdan ud (klik pĺ billedet for at se detaljer):Udgangspunktet for at bygge basisrobotten er delene i LEGO EV3 Core Set 45544 og byggevejledningen for RileyRover af Damien Kee. Nĺr byggevejledningen er fulgt fĺs en robot som ser sĺdan her ud (klik pĺ billedet for at se detaljer): Vend EV3 kontrolenheden om sĺ den vender som pĺ basisrobotten. De to store motorer, som driver hjulene, skal forbindes til de to porte B og C. Afprřvning af motorerInden basisrobotten programmeres kan det vćre nyttigt
Vćlg dernćst Generelt og vćlg Hardwareside: Under Hardwareside find Portvisning: I Fanen Portvisning ses altsĺ hvilke motorer og sensorer, som er tilsluttet portene pĺ EV3. Eksemplet viser, at to store motorer er tilsluttet port A og B og en tryksensor er tilsluttet port 4. Nĺr basisrobotten er forbundet med USB (eller forbundet trĺdlřst) til en PC, kan portvisningen altsĺ vćlges ved at klikke pĺ Fanen Portvisning i nederste hřjre hjřrne af programmeringsvćrktřjet. I Portvisning for basisrobotten ses, at to store motorer er tilsluttet port B og C. Portvisningen kunne f.eks. se sĺdan her ud: Med Portvisning er det muligt at undersřge motoromdrejningssensorerne pĺ de to motorer: Opgave 1: Prřv at dreje pĺ de to hjul. Hvad sker med tallene ud for de to motorporte?En forklaring pĺ tallene ud for de to motorporte kan findes under Brug af motoromdrejningssensoren under EV3 Hjćlp, Generelt og Brug af sensorer: Portvisning pĺ EV3 skćrmI EV3 brugervejledning, side 26, forklares under EV3-klodsgrćnsefladen, hvordan Portvisning ogsĺ kan foregĺ pĺ EV3 skćrmen. Det betyder, at Portvisning kan foregĺ uden at EV3'en er forbundet til en PC.Motorstyring med EV3 knapperDer er mulighed for ved hjćlp af knapperne pĺ EV3 at styre motorerne. Vćlg Motorstyring som forklaret pĺ side 26 i EV3 brugervejledning.Programmering af křrsel med basisrobotPrřv at se, hvordan basisrobotten křrer ved at bruge et simpelt program med blot en programmeringsblok, en bevćgelsesstyring-blok:Programmet fĺr robotten til at křre fremad. Hjulene roterer en omdrejning inden robotten stopper. Hold řje med den hvide "pil" inde i hjulene, som viser, at der netop křres en omdrejning.
Opgave 2: De forskellige indstillingsmuligheder i bevćgelsesstyring-blokken er beskrevet i EV3 hjćlp. Find beskrivelsen ved i programmeringsvćrktřjet at gĺ ind i Vis EV3 hjćlp: Vćlg dernćst Programmeringsblokke og under Handlingsblokke vćlg Bevćgelsesstyring: Opgave 3: Prřv at sćtte flere bevćgelsesstyring-blokke efter hinanden og fĺ pĺ den mĺde robotten til f.eks. at křre et stykke frem og sĺ bakke det samme stykke tilbage. Eller prřv at fĺ robotten til at křre i en firkant, som robotten pĺ videoen, der fřlger kanten af en gulvflise med sidelćngde 30 cm:
|