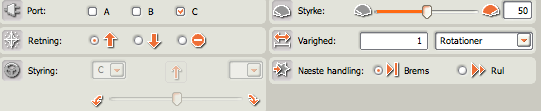
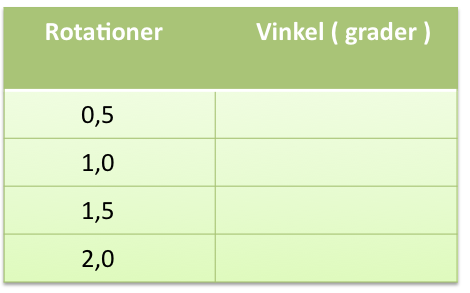
Hvis blot den ene motor, f.eks. den venstre motor, sættes til at køre 1 rotation fremad og den højre motor sættes til at stå stille, vil robotbilen dreje til højre. For at få robotbilen til at dreje på denne måde skal kør ikonet indstilles i konfigurationspanelet, så blot motor C er markeret under Port som aktiv. Prøv med motorstyrke 50 og 1 rotation. Brug en vinkelmåler til at måle, hvor mange grader robotten drejer. Hvor langt mon robotten drejer, når hjulet sættes til at dreje 2 rotationer? Prøv. Og 0,5 rotationer, altså en halv omdrejning af hjulet? Eksperimenterne med kør ikonet og forskellige antal rotationer viser, at hvis blot det ene hjul sættes til at dreje er resultatet, at robotten drejer i en cirkel med centrum i det hjul som står stille. Hvor stor en vinkel robotten drejer afhænger af antal rotationer: Jo flere rotationer, jo større vinkel. For at få et mere præcist billede af hvordan vinklen afhænger af antallet af rotationer, kan vinklen måles for flere forskellige antal rotationer omkring de 0,5 til 2 rotationer. F.eks. en halv rotation, en rotation, en og en halv samt to rotationer. Prøv med motorstyrke 50, sæt målingerne ind i en tabel:
Indsæt de fire målinger i et koordinatsystem med antal rotationer udad x aksen og vinklen opad y aksen og forbind de fire punkter med tre linier. De tre linier vil næsten udgøre en samlet ret linie igennem de fire punkter. Antages, at alle målepunkter vil ligge på en ret linie, fører det til, at vinklen kan udregnes ud fra antal rotationer som:
Faktoren a på højre side af ligningen er den vinkel, som robotbilen drejer, når venstre hjul drejer 1 rotation. Indsæt den værdi for a, som blev fundet i tabellen og undersøg om vinklerne i tabellen passer med de vinkler, som fås ud fra formlen. I Drej på stedet blev det også fundet, at drejningsvinklen kunne udregnes ud fra antal rotationer. Faktoren a blev fundet til 183 grader, altså den vinkel som robotbilen drejer på stedet, når begge hjul drejer 1 rotation i modsat retning. En model af hvordan robotbilen drejer blev i Drej på stedet brugt til at vise, at den vinkel robotbilen drejer på stedet afhænger af antal rotationer hjulene kører, af hjulets størrelse og afstanden imellem hjulene:
Mon ikke en lignende sammenhæng gælder for drej om det ene hjul? Den cirkel bilen kører rundt i er dog anderledes. I drej på stedet var hjulafstanden jo cirklens diameter, i drej om hjul er hjulafstanden derimod radius og dermed er diametren lig 2 x hjulafstand. Indsættes 2 x hjulafstand som cirklens diameter, fås vinklen for drej om det ene hjul som:
De vinkler robotbilen drejer på stedet og om hjul kan altså beregnes ud fra rotationer, hjuldiameter og hjulafstand:
De to formler viser, at vinklen er halvt så stor, når bilen drejer om det ene hjul som den vinkel bilen drejer på stedet. I Drej på stedet blev det målt, at robotbilen drejer omkring 183 grader på stedet, når hjulene drejer 1 rotation. Ud fra formlerne kan det forudses, at vinklen vil være omkring 183/2 = 92 grader, når bilen drejer om det ene hjul med 1 rotation. Og det er uafhængigt af de aktuelle værdier af hjuldiameter og hjulafstand. Passer det med de tal, som blev målt i tabellen? Prøv med andre hjul og hjulafstande og se om forholdet imellem drejningsvinkler for de to drejemåder er som forudsagt af formlerne. |