En simpel tegnekonkurrence kunne være:
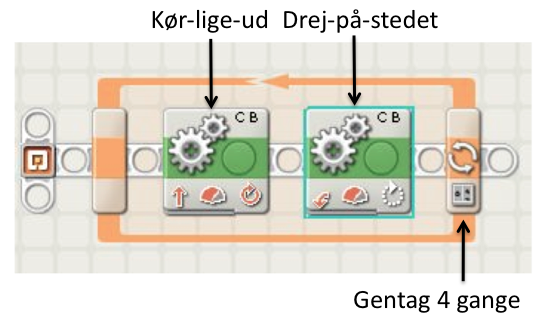
Tegn en trekant med sidelængde 20 cm. Den hold hvis robot kan tegne trekanten mest nøjagtigt har vundet. Tag programmet, der får robotten til at køre i firkant som udgangspunkt: Firkant programmet skal ændres på tre punkter for at få et trekant program som får robotten til at køre i en ligesidet trekant med sidelængde 20 cm:
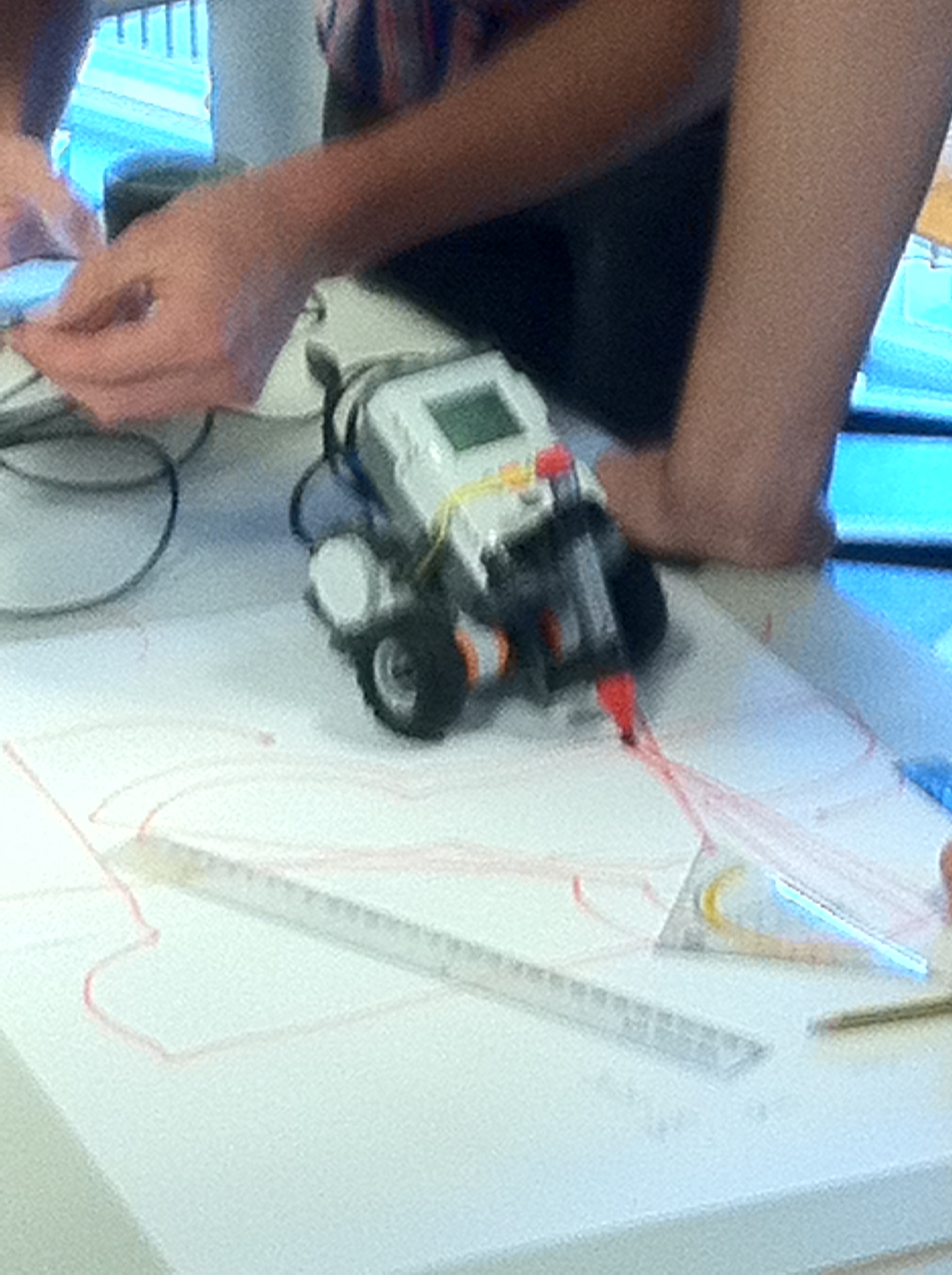
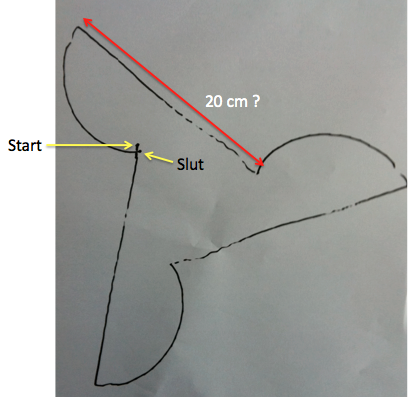
At prøve sig fremDen simpleste fremgangsmåde i punkterne 2 og 3 er sådan set at prøve sig frem. Start med kør-lige-ud og lav ændringer i konfigureringspanelet indtil robotten netop kører 20 cm. Brug lineal til at afgøre, hvor nøjagtigt robotten kører. For drej-på-stedet kan en vinkelmåler bruges for at afgøre, hvor nøjagtigt robotten drejer, eller det kan konstateres om robotten efter 3 drej er kommet en hel omgang rundt.Når robotten kører i en trekant, vil den monterede tusch ikke tegne en trekant med mindre touschen er monteret midt på en linie imellem de to hjul. Så tegningen vil have buer i trekantens hjørner. Videoen viser en robot, der kører i trekant, næsten, og den tegning, som den laver på papiret. Af tegningen kan det tydeligt ses om robotten kører tilbage til sit udgangspunkt og om de lige stykker er 20 cm. Når det skal afgøres, hvilken robot, som har tegnet mest nøjagtigt, kan det f.eks. gøres ved at måle, hvor langt der er fra startpunktet til slutpunktet og måle alle 3 sider og se hvilken, som kommer tættest på 20 cm. Den mindste fejl på de 3 sider kan så lægges sammen med afstanden imellem start og slut. Robottegningen med lavest sum er mest nøjagtig. At regne den udAt prøve sig frem er en måde at finde frem til de rotationsantal, som skal stå i konfigureringspanelerne for de to kør ikoner. En anden måde er at regne sig til tallene ud fra den måde robotten kører på. Når robotten kører lige ud, må strækningen den kører jo afhænge af hjulets størrelse, men hvordan? og hvordan afhænger robottens kørsel i drej-på-stedet af rotationstallene? Det afhænger af bilens fysiske opbygning altså f.eks. af hvor store hjulene er og hvordan de er monteret. Basisrobotten har 3 hjul. De 2 kan kører med eller mod uret drevet af de to motorer. Det tredie hjul er blot et støttehjul.
Når de to drivhjul bevæger sig, vil robotten køre, hvis den vel at mærke står på en overflade, så hjulene kan få fat. Hvordan kører den? og hvor langt kører den? Kan det regnes ud på forhånd? Det simpleste at regne ud er strækningen i kør-lige-ud, men det er også muligt at regne vinklen ud i drej-på-stedet og formen på den cirkelbue robotten tilbagelægger, når begge motorer bliver sat til at køre, men med forskellig hastighed.
|