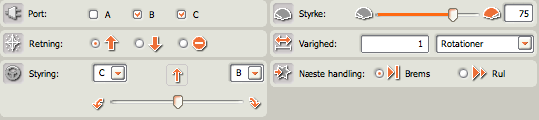
Start med kør ikonet, som får robotten til at køre fremad og stoppe,
når begge motorer har drejet en omgang, altså 1 rotation. Mål hvor mange cm robotten kører.
Hvor langt mon den kører, når hjulene sættes til at dreje 2 rotationer? Prøv. Og 1,5 rotationer, altså en og en halv omdrejning af hjulene?
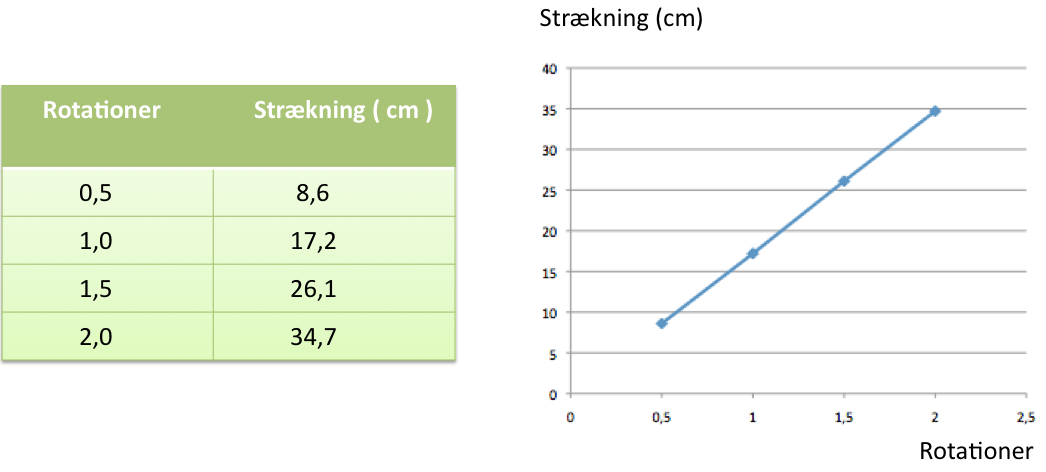
Eksperimenterne med kør ikonet og forskellige antal rotationer viser, at hvis begge hjul sættes til at dreje i samme retning og med samme motorstyrke vil begge hjul tilbagelægge samme strækning og resultatet er, at robotten kører lige ud. Hvor langt robotten kører afhænger af antal rotationer: Jo flere rotationer, jo længere kører bilen.I trekant programmet er det jo meningen, at robotbilen skal køre 20 cm. Ud fra eksperimenterne ses det, at en strækning på 20 cm fås, når hjulene drejer mere end 1 rotation og mindre end 2 rotationer. For at få et mere præcist billede af hvordan strækningen afhænger af antallet af rotationer, kan strækningen måles for flere forskellige antal rotationer omkring de 1 til 2 rotationer. F.eks. en halv rotation, en rotation, en og en halv samt to rotationer. I et eksperiment med motorstyrke 75 måltes strækninger som vist i tabellen:
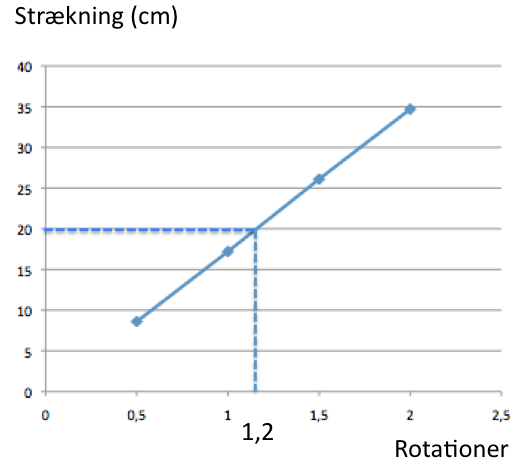
Indsættes de fire målinger i et koordinatsystem med antal rotationer udad x aksen og strækning opad y aksen, kan de fire punkter forbindes med tre linier. Og de tre linier udgør næsten en samlet ret linie igennem de fire punkter. Antages, at nye målinger også vil føre til punkter, som ligger på den samlede rette linie, kan linien bruges til at finde antal rotationer, som får robotbilen til at køre 20 cm: Find 20 cm på y aksen, følg den stiplede linie fra 20 cm til et punkt på x aksen. Aflæs værdien på x aksen altså cirka 1,2 rotationer. Prøv det.
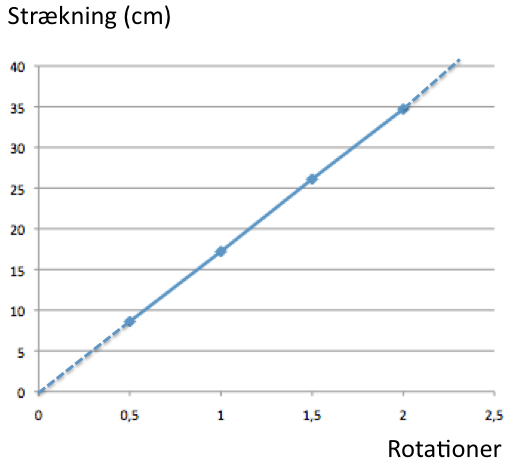
Når antal rotationer er 0, må strækningen være 0, bilen kører jo ingen steder. Punktet (0,0) er altså også et målepunkt. En ret linie imellem (0,0) og målepunktet for antal rotationer 0,5 ses at have samme retning som de tre liniestykker og de fem målepunkter ser ud til at ligge på en ret linie. Målepunkter for antal rotationer ud over 2 kunne også tænkes at følge mønstret og ligge på linien. Så en rimelig antagelse ud fra eksperimenterne vil være, at nye målinger vil føre til målepunkter som ligger på en linie som starter i (0,0), går nogenlunde igennem de fire målepunkter og fortsætter opad.
Antagelsen om at alle målepunkter vil ligge på en ret linie, fører til, at strækningen kan udregnes ud fra antal rotationer som:
Faktoren 17,2 på højre side af ligningen er den strækning, som robotbilen kører, når hjulene drejer 1 rotation. Ligningen giver for en halv rotation en strækning på 17,2x0,5 cm = 8,6 cm som passer med målingen i tabellen, for 1,5 fås 17,2x1,5 cm = 25,8 cm, som blot er 3 mm forskellig fra måleresultatet i tabellen, og for 2 rotationer giver ligningen 34,4 cm, igen med en forskel på 3 mm til tabellens måleresultat. Og ligningen passer for rotationer = 0. Ligningen ser altså ud til at kunne bruges til at udregne den strækning robotbilen kører for det antal rotationer, som angives i konfigutrationspanelet for kør ikonet. Ligningen kan bruges til at udregne antal rotationer hjulene skal dreje, for at robotbilen kører 20 cm, nemlig:
og dermed:
Prøv med 1,16 rotationer og mål om det bliver mere nøjagtigt end med 1,2 rotationer som blev prøvet før. Husk
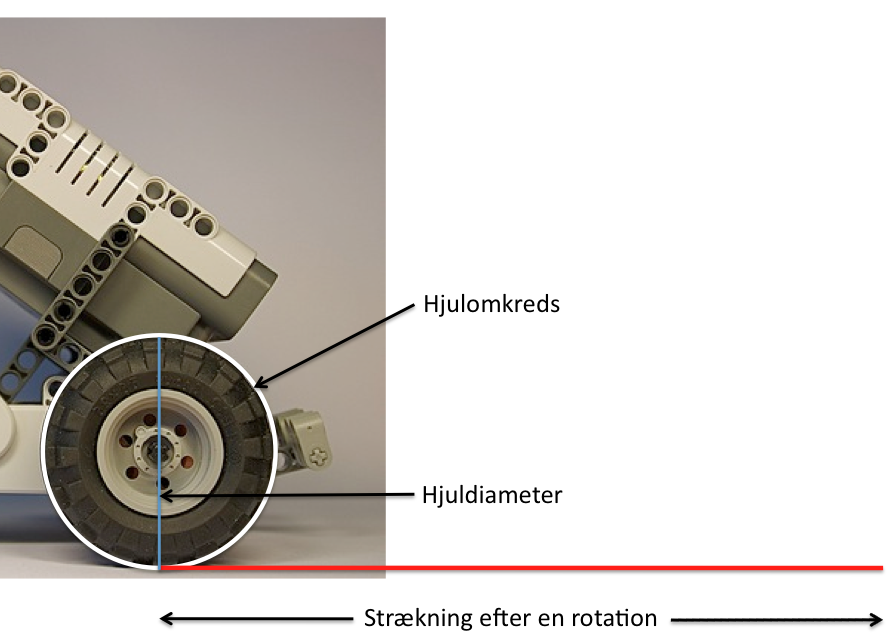
Faktoren 17,2 på højre side af ligningen
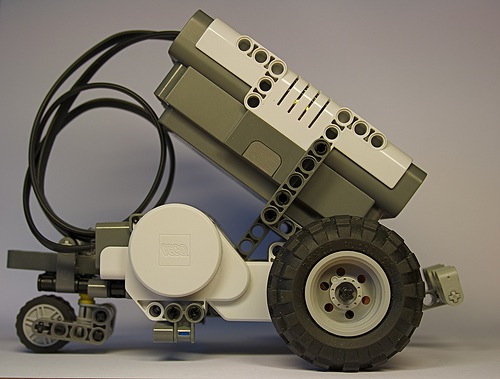
er som beskrevet ovenfor, den strækning som robotbilen kører, når hjulene drejer 1 rotation. På figuren
er denne strækning vist med rød. Hvis hjulet drejer en omgang uden at glide på underlaget, svarer den røde strækning til omkredsen af hjulet, altså omkredsen af den hvide cirkel. Hjulomkredsen fås som bekendt ud fra hjuldiametren ved at udregne:
og dermed, at strækningen kan udregnes ud fra hjuldiametren som:
Hjuldiametren står på dækket til at være 5,6 cm:
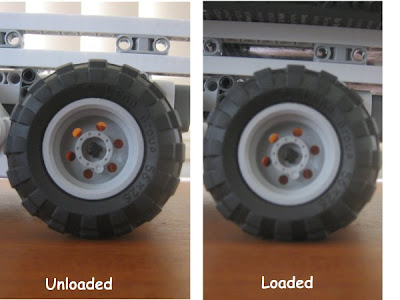
Bruges 3,14 for π fås hjulomkreds til 3,14x5,6 cm altså cirka 17,6 cm og bruges en hjuldiameter på 5,5 cm fås 17,3 cm. Hvis det antages, at hjulet er en lille smule fladtrykt på grund af vægten af bl.a. NXT enheden, ser det altså ud til, at faktoren på 17,2 cm kan forklares som hjulets omkreds. At lettere fladtrykte dæk måske er forklaringen på, at en Lego bil tilbagelægger kortere strækninger end forventet, kan læses i et indlæg i "The NXT STEP Blog" med titlen "Why is my robot not perfect". Her konstateres, at en NXT styret Lego bil tilbagelægger en noget kortere strækning, når bilen har læs på end når bilen kører uden læs. Dette forklares med, at dækkene er mere fladtrykt, når der er læs på bilen. Hjuldiametren bliver mindre og dermed hjulomkredsen som jo bestemmer, hvor langt bilen kører, når hjulene drejer en omgang.
Prøv eventuelt med større eller mindre hjul og se om den faktor, der indgår i beregningen af strækning, passer med hjulomkredsen af de nye hjul. |